Introduction
what is DIP?
인간의 해석을 위해 그림 정보를 개선하기 위한
홍채 인식
- 완전히 동일한 홍채가 존재할 확률 : 1/(10^78)
- 추출된 독립 변수(degrees of freedom)
- IrisCode record size: 512 bytes
- speed(database of 100,000 IrisCode records): 두번 중 한번

빛 수용기관
- Cones - photopic (bright-light) vision => 밝은 날에 사물을 인식하도록 돕는 기관.
- sensitive to colors
- Rods - scotopic (dim-light) vision => 해상도, 크기 등을 판단하는데에 도움 - 밤에 활성화
- given general picture
밝기 적응도
- 빛의 세기 적응 범위 = 10^10 mL (1 lambert (L) = 0.3183 cd/㎠ )
- HVS 는 높은 범위에서 작동할 수 없음.
- walking into dark theater, one can only distinguish to B and takes time for scotopic vision to pick
- 주관적 밝기는 눈에 입사하는 빛의 강도의 로그 함수이다.
- 주어진 조건 집합, HVS의 현재 intensity 레벨을 밝기(intensity) 적응 레벨이라고 한다.
- walking into dark theater, one can only distinguish to B and takes time for scotopic vision to pick
Visual Perception
- Brightness Discrimination(밝기 구분)
- 밝기 판별은 특정 적응 수준에서 빛의 세기 변화를 구별할 수 있는 능력이다.
- small Weber ratio : 차이를 알아차리기 위해 작은 비율의 intensity 변화가 필요함 --> 양호한 밝기 감별 --> 중간 강도 (밝기가 조금만 변해도 인식 가능 -> delta.I가 작아도 ok)
- large Weber ratio : 차이를 알아차리기 위해 큰 비율의 intensity 변화가 필요함 --> 저조도 판별 --> dark/bright intensity (밝기를 인식하려면 변화가 커야함 -> delta.I가 반드시 커야함.)
- 낮은 수준의 조도(illumination)에서 밝기(discrimination)를 판별할 수 없음.
- 배경 조도(illumination)가 증가함에 따라 크게 향상됨


s 

- 밝기 판별은 특정 적응 수준에서 빛의 세기 변화를 구별할 수 있는 능력이다.
- Brightness Adaptation & Discrimination
- perceived brightness is not a simple funtion of intensity
- mach bands
HVS tends to undershoot or overshoot around boundary of region
of different intensities - Simultaneous contrast
region may appear to becone darker as background gets lighter
- Optical illusions (시각적 오해)
eye fills in non-existing information by geometrical properties of objects
- mach bands
- perceived brightness is not a simple funtion of intensity
Sensing & Acquisition (영상물 취득 과정)
- Acquisition Process
- Sensors - 하나의 용기 & 그릇
- 빛이 오면 빛의 세기를 sensor에 담는데, 어떠한 빛의 성분을 담는지는 sensor 위의 filter에 의해 결정
- 3가지의 filter이용 (RGB) => RGB의 양이 Sensor에 input

하나의 센서에서 RGB값 받는것보다 거울을 이용해서 빛을 분해하는 방식의 화질이 더 좋다.
- 3가지의 filter이용 (RGB) => RGB의 양이 Sensor에 input
- 빛이 오면 빛의 세기를 sensor에 담는데, 어떠한 빛의 성분을 담는지는 sensor 위의 filter에 의해 결정
- CCD vs. CMOS
- Types of Sensors
- Demosaicing(모자이킹)

- The filter pattern is 50% green, 25% red and 25% blue, hence is also called BGGR, RGBG, GRGB, or RGGB
- Demosaicing generates different color performance. Each company holds unique DIP algorithm for demosaicing process
- DIP Engines

- Sampling & Quantization




- Sampling : Continuous한 값을 단계별로 쪼개서, 그 위치에서만 값을 취득( = 시간 축을 disitite)
- Quantization : 맨 끝 범위에서만 값을 얻어내고 값의 크기를 disitization함다. (continuous한 값을 쪼개서 범위에 있는 값으로 mapping)
- Countinuous한 값을 sampling해서, 그 위치에서의 값을 읽어오면 그 위치에서의 값을 quantization해서 일정한 범위의 값을 discrite한 quantization
- Digitizing time interval
- Digitizing amplitude value
- Countinuous한 값을 sampling해서, 그 위치에서의 값을 읽어오면 그 위치에서의 값을 quantization해서 일정한 범위의 값을 discrite한 quantization
- Down-sampling & Up-sampling
- Up-sampling - x축, y축이 2배로 늘어남
- Down-sampling - x축, y축이 2배로 줄어듦.
- Sampling은 화질에 영향을 끼침.
- Sampling affects its resolution as well as data rate
- 2배로 down-sampling만 진행한 결과 vs. anti-aliasing filter통과하고 down-sampling한 결과
- anti-aliasing filter를 통과한게 background가 뚜렷(잡음 추가)
- 또렷해 보이는거 정확한 값 알 수 없음.
- anti-aliasing filter를 통과한게 background가 뚜렷(잡음 추가)
- 2배로 down-sampling만 진행한 결과 vs. anti-aliasing filter통과하고 down-sampling한 결과
- Quantization also affects its resolution as well as data rate
- (선명한 화질의 사진과 그렇지 않은 사진) 두 결과만 가지고 quantization 때문인지 sampling 때문인지 구분 불가. => 부연 정보 이용.
- Intensity slicing : bit-plane slicing
- 하나의 영상물을 8개의 binary영상물로 나누는 것.
- 0~7이기 때문에 8bit

bit의 맨 왼쪽, bit의 가운데, bit의 마지막(가장 bit수가 낮음) - 마지막 장은 가장 bit수가 적어서 변형을 주게 됨. 그래서 빼도 상관 없음.
- 0~7이기 때문에 8bit
- 하나의 영상물을 8개의 binary영상물로 나누는 것.
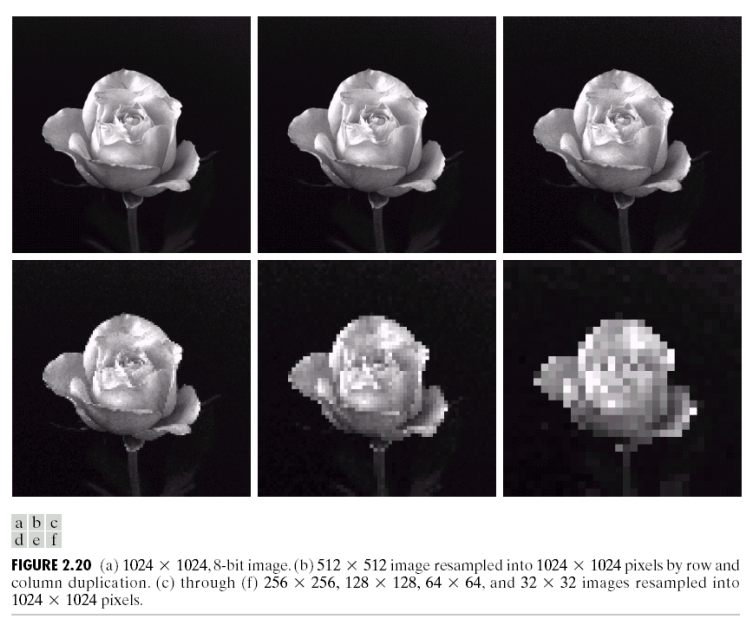
- Spatial & Gray-Level Resolution
- Gray-level resolution : smallest discernible change in gray level

- Gray-level resolution : smallest discernible change in gray level
- Aliasing & Moire Patterns





Relationships Between Pixels
- Neighborhood of pixels
- Any image can be represented as followings

- Any image can be represented as followings
- Connectivity / Adjacency
- Two pixels that are neighbors and have same gray values(동일한 밝기의 화소를 가질 때) are adjacent.
- 주변 화소 값을 이용해서, 그 화소가 관심있는 화소와 어느정도 밀접하게 연관이 있는 지를 알 수 있다.
- Distance measure between pixels
- Let x, y be pixels with coordinate x[n, m], y[p, q]





- Let x, y be pixels with coordinate x[n, m], y[p, q]
- Two pixels that are neighbors and have same gray values(동일한 밝기의 화소를 가질 때) are adjacent.
2강에서 주요하게 볼 것.
영상물을 취득하고 해석하는 과정과 특성
intensity변화율에 따른 인식 차이
Sampling에 따른 영상물의 변
pixel계산하는 방법
'정보통신공학전공 > 디지털영상처리' 카테고리의 다른 글
| 디지털영상처리 3강 정리 (1) | 2023.10.22 |
|---|---|
| 디지털영상처리 1강 정리 (3) | 2023.09.25 |